

")
")
")
")
")
")
Продуктови акценти
- Рентабилност
Лесен достъп до системите за автоматизация чрез фокусиране върху изискванията на конкретните приложения. Доказана ефективност за рентабилен достъп - Индивидуални концепции за захващащи устройства
Меки, регулируеми пръсти със специално разработена форма – за деликатни и разнообразни продукти без повреждане - Абсолютна гъвкавост
Инструменти за края на роботизирана ръката според вашите спецификации: Използвайте доказана технология на пръстите, за да създадете индивидуални роботизирани захващащи устройства за конкретни приложения - Бърза адаптация
Регулируемите модули на пръстите и сменяемите плочи позволяват бърза адаптация на захващащото устройство без нови инвестиции – идеално за интегратори и тестови конфигурации
Дизайн
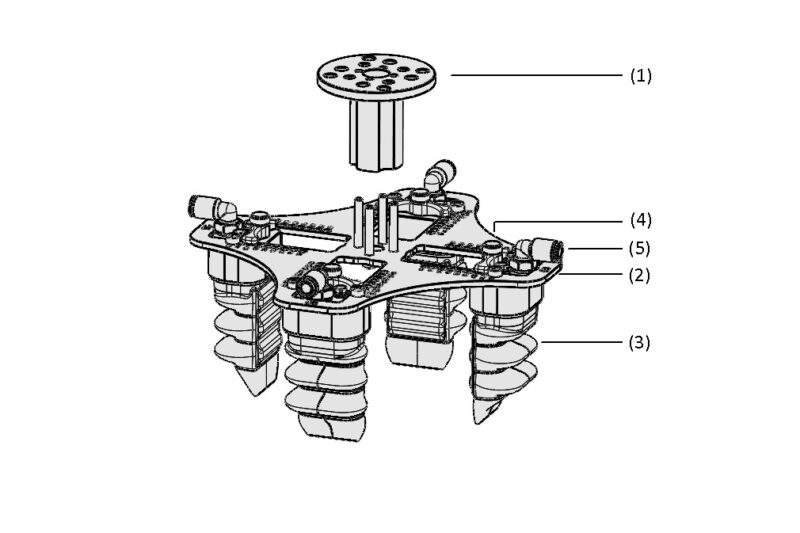
- Фланцова плоча (1) за свързване към стандартни роботи
- Пръстов модул (3) за свързване на пръст към краен ефектор EOAT
- Допълнителна монтажна скоба (плъзгаща скоба) (4) за бърза и лесна настройка на разстоянието между пръстовите модули
- Пневматичен конектор (5) захранва захватния механизъм със сгъстен въздух или вакуум за затваряне и отваряне на пръстите
Индустрии
- Хранителни продукти
- Логистика